
Область применения
В этом прикладном руководстве сначала рассматриваются основы теории управления, частотные (Bode) диаграммы и отклики полюсов и нулей. Затем более подробно описываются передаточные функции силовой части и контроллера.
Для полноценного понимания устойчивости замкнутой петли полезны базовые знания линейной теории управления, включая частотные диаграммы (Bode) и общее представление о передаточных функциях. Без углубления в сложную математику данный документ сначала описывает простой практический подход из 9 шагов к проектированию устойчивых петель регулирования. Также приведён практический пример, демонстрирующий применимость этого подхода в реальных схемах.
Часто у инженеров нет в распоряжении анализаторов частотной характеристики для построения петли отклика источника питания. Для таких случаев включён раздел по анализу и интерпретации сигнала во временной области. Для разработчиков, заинтересованных в более глубоком анализе, в приложениях A и B приведены подробные передаточные функции силовой и управляющей частей схемы.
Основы линейной теории управления
Мы кратко напомним читателю некоторые базовые понятия линейной теории управления. Опытные специалисты могут сразу перейти к разделу «Пошаговая процедура проектирования», если чувствуют себя уверенно в понимании основных понятий, таких как отклики первого и второго порядка и диаграммы Bode.
Отклик первого порядка
Отклик с одним полюсом создаёт наклон −20 дБ/декаду (или +20 дБ/декаду для отклика с одним нулём) выше частоты излома (угловой частоты), как показано на рисунках 2a и 2b соответственно. Общий сдвиг фазы составляет −90° (или +90° для нуля). На рисунке 2a видно, что асимптотическая кривая (прямая линия) на 3 дБ выше точной кривой на частоте излома. Наклон ±20 дБ/декаду также иногда обозначается как наклон ±1 в некоторых источниках.

Отклик второго порядка
Отклик второго порядка показан на рисунках 3a и 3b, как это наблюдается, например, в LC-цепи. Кривая амплитудной характеристики имеет наклон −40 дБ/декаду (или наклон −2) после частоты LC-резонанса (также называемой резонансной частотой) и суммарный сдвиг фазы составляет 180°.
Величина усиления в области пика и скорость спадания фазы зависят от значения ζ (дзета) — коэффициента демпфирования, и от добротности Q LC-контура. Оба этих параметра безразмерны и описывают степень затухания колебаний в резонансной цепи.
Чем выше демпфирование в LC-цепи, тем меньше пик на амплитудной характеристике и тем медленнее спад фазы.
Абсолютная, относительная и условная устойчивость
Когда система подвергается внешнему возмущению, возможны два варианта её поведения после устранения этого возмущения:
-
Она возвращается к состоянию равновесия.
-
Она не возвращается — и остаётся неустойчивой.
Если система достигает какого-либо устойчивого состояния равновесия, говорят, что она обладает абсолютной устойчивостью.
Относительная устойчивость описывает, насколько близка система к границе неустойчивости. Для этого используют два показателя: запас по усилению и запас по фазе.
Чтобы понять эти два показателя, важно помнить, что система становится неустойчивой, когда её фазовый сдвиг достигает 180°, а коэффициент петли (loop gain) равен 0 дБ.
-
Запас по усилению (gain margin) — это насколько можно увеличить усиление до того момента, когда система станет неустойчивой при фазовом сдвиге 180°.
-
Запас по фазе (phase margin) — это сколько дополнительного фазового сдвига может выдержать система до потери устойчивости при коэффициенте усиления 0 дБ.
Обычно системы проектируют с минимальным запасом по усилению 6 дБ и запасом по фазе 45°, чтобы обеспечить устойчивость в условиях разброса параметров компонентов, старения, изменения температуры и нагрузки.
Некоторые компании применяют ещё более строгие требования: 10 дБ по усилению и 60° по фазе для своих источников питания.
Условно устойчивая система — это система, в которой усиление остаётся выше 0 дБ в тот момент, когда фазовый сдвиг уже превышает 180°, но затем фаза снова становится меньше 180° до того, как усиление пересечёт отметку 0 дБ.
Разработка условно устойчивых систем не рекомендуется, поскольку существуют сценарии, при которых усиление петли может внезапно снизиться (например, во время запуска, при переходных процессах или в случае насыщения усилителя ошибки), что может привести к резкой потере устойчивости.
Зачем нам нужен контур управления?
Инстинктивный ответ на этот вопрос будет таким: «Чтобы управлять выходным напряжением и удерживать его стабильным», — и это совершенно верно.
Однако в процессе поддержания выходного напряжения стабильным при любых условиях нагрузки и питающего напряжения возникают определённые сложности.
Например, при увеличении входного напряжения выходное напряжение также начнёт расти. Чтобы компенсировать это, необходимо уменьшить рабочий цикл (duty cycle), чтобы вернуть выходное напряжение к заданному значению.
Такие изменения (или возмущения) на выходе могут привести к колебательному или неустойчивому отклику.
Именно поэтому важно обеспечить достаточный запас по фазе и усилению, чтобы гарантировать устойчивую работу во всём рабочем диапазоне устройства.

Обратная связь по напряжению (Voltage Mode Feedback)
Классический механизм управления по напряжению показан на рисунке 4, где выходное напряжение сравнивается с опорным напряжением, чтобы сгенерировать сигнал ошибки.
Этот сигнал ошибки поступает на ошибко-усилитель с компенсацией, который формирует управляющий сигнал.
Управляющий сигнал затем обрабатывается генератором ШИМ (PWM) для формирования соответствующего рабочего цикла (duty cycle), который управляет временем включения ключа и регулирует выходное напряжение.
Нуль в правой полуплоскости (Right Half Plane Zero, RHP Zero)
Передаточная функция обратноходового (flyback) источника питания, работающего в режиме непрерывной проводимости (CCM), содержит особый нуль в правой полуплоскости (RHP нуль), который часто рассматривается как причина избегать CCM.
RHP-нуль ведёт себя как обычный нуль по амплитуде, но по фазе он ведёт себя как полюс, что делает его очень сложным для компенсации.
В реальной схеме RHP-нуль приводит к тому, что выход источника питания изначально реагирует в противоположную сторону, чем задаёт контроллер.
Время, через которое выход начинает реагировать в правильном направлении, определяется частотой RHP-нуля.
Чтобы понять этот механизм, рассмотрим обратноходовой преобразователь с фиксированной частотой переключения, работающий в CCM.
Выходной конденсатор заряжается током из дросселя во время времени выключения ключа. Первоначальное увеличение рабочего цикла (duty cycle) увеличивает ток (а следовательно, и запасённую энергию) в дросселе. Однако поскольку частота переключения фиксирована, увеличение рабочего цикла означает уменьшение времени выключения, то есть времени, когда дроссель может передать свою энергию на выход (конденсатор и нагрузку).
В результате количество переданной энергии уменьшается, что вызывает первоначальное падение выходного напряжения, несмотря на команду контроллера его увеличить.
Такое поведение характерно только для CCM. В режиме прерывистой проводимости (DCM) присутствует время простоя (когда и первичный ключ, и вторичный диод выключены), поэтому сокращение времени выключения не снижает эффективность передачи энергии.
Следовательно, RHP-нуль наблюдается только в CCM.

Пошаговая процедура проектирования
Примечание: В этом анализе предполагается, что постфильтр (post filter) не влияет на петлю регулирования до своей резонансной частоты. Спроектируйте постфильтр таким образом, чтобы его резонансная частота (между LPF и CPF) была выше 10 кГц, чтобы выполнить это условие.
Шаг 1 — Задание параметров производительности петли (Loop Performance Parameters)
Рассчитайте ожидаемое положение RHP-нуля
Используя уравнение 12 из Приложения A, рассчитайте частоту RHP-нуля при минимальном входном напряжении (low-line). Формула имеет вид:

Шаг 2 — Выбор выходного фильтрующего конденсатора Co
Шаг 3 — Выбор RF5 и CF3
Типовая схема контура управления показана на рисунке 5. Резистор RF5 и CF3 вместе с внутренним сопротивлением управляющего вывода (примерно 15 Ом) формируют пару полюс-нуль в частотной характеристике. Эта пара полюс-нуль не участвует активно в компенсации контура. См. Приложение B для более детального рассмотрения этих двух компонентов и результирующей пары полюс-нуль.
Конденсатор CF3 — это конденсатор, который питает внутренние схемы TOPSwitch и также определяет интервал времени до автоматического перезапуска. Таким образом, он слабо влияет на характеристику обратной связи. Стандартные значения для этого компонента находятся в пределах от 10 мкФ до 100 мкФ, рекомендованное значение — 47 мкФ.
RF5 — это небольшой резистор, который используется последовательно с CF3. Назначение этого резистора — ввести стабильное последовательное сопротивление (в дополнение к ESR CF3) и сдвинуть частоты пары полюс-нуль ƒZERO(TOP) и ƒPOLE(TOP) как можно ближе друг к другу. RF5 следует выбирать в пределах от 0 Ом до 22 Ом.
CF3 = 47 мкФ
RF5 = от 0 до 22 Ом
Большие значения RF5, как правило, сближают пару полюс-нуль, образованную ƒZERO(TOP) и ƒPOLE(TOP). Однако, поскольку управляющий вывод также является выводом питания для контроллера внутри TOPSwitch, значение RF5 не может быть увеличено бесконечно. Значения выше 22 Ом следует избегать, рекомендованное значение — 6,8 Ом.
Шаг 4 — Выбор оптопары
CTR (коэффициент передачи тока) оптопары может играть значительную роль в общем усилении петли. Рекомендуемое номинальное значение CTR — 1 с заданным диапазоном, например, от 0.8 до 1.6. Более высокий CTR следует компенсировать более высокими значениями ограничивающего усиление резистора (RF3), и наоборот.
Шаг 5 — Выбор усилителя ошибки и опорного напряжения
Для недорогих источников питания очень часто усилитель ошибки и опорное напряжение объединены в одном корпусе. Наиболее популярная микросхема усилителя ошибки и опорного напряжения, обеспечивающая хорошую производительность, — это TL431. Она доступна в двух вариантах, в зависимости от опорного напряжения. Для низких выходных напряжений (3.3 В и ниже) используйте опорное напряжение 1.25 В, а для более высоких выходных напряжений используйте опорное напряжение 2.5 В. Опорное напряжение 1.25 В также требует меньших токов смещения и может использоваться для приложений с низким входным потреблением в режиме ожидания.
Шаг 6 — Выбор RF1
Резистор RF1 обычно не влияет на отклик петли и не появляется ни в одном из уравнений усиления или фазы. Он устанавливает делитель напряжения таким образом, чтобы схема TL431 получала соответствующий ток смещения по отношению к входному току на выводе REFERENCE. Резистор на 10 кОм — хороший начальный выбор для этой позиции. Слишком высокое значение приводит к недостаточному питанию усилителя ошибки, в то время как слишком низкое значение увеличивает рассеяние мощности. В общем случае рекомендуется выбирать RF1 в диапазоне от 2 кОм до 50 кОм.
Шаг 7 — Выбор RF2
Резистор RF2 определяет выходное напряжение, и как только выбран RF1, его можно легко рассчитать по следующему выражению:

Vo — выходное напряжение,
Vref — опорное напряжение TL431 (обычно 2.5 В или 1.25 В). Таким образом, для выходного напряжения 12 В, RF2 будет равен 38 кОм при RF1, равном 10 кОм. Рекомендуется использовать резисторы RF1 и RF2 с допуском 1%.
Шаг 8 — Выбор компенсационного конденсатора CF1
Выберите компенсационный конденсатор таким образом, чтобы ноль (ƒZERO), совместно с полюсом (ƒPOLE — внутренний полюс TOPSwitch, равный 7 кГц), обеспечивали максимальный фазовый прирост на требуемой частоте пересечения (ƒCROSSOVER), которая обычно составляет 1 кГц. Из уравнения (25) в Приложении B видно, что ƒZERO определяется RC-цепочкой, образованной входным резистором TL431 (RF2) и компенсационным конденсатором (CF1) TL431. Выберите ƒZERO в диапазоне 100 Гц. Если предполагается, что схема будет работать также в режиме прерывистого тока (discontinuous mode), рекомендуется установить ƒZERO на уровне 50 Гц, а не 100 Гц, чтобы избежать условной нестабильности в режиме прерывистого тока. Выберите конденсатор, используя
Шаг 9 — Выбор резистора RF3 для регулировки усиления
Резистор RF3 задаёт усиление функции передачи с разомкнутой петлёй. Этот компонент сдвигает весь график амплитудной характеристики вверх или вниз, не влияя на фазовую характеристику.
В идеале следует построить функции передачи каскада мощности и управляющего каскада (приведены в Приложениях A и B), а затем определить, насколько необходимо уменьшить усиление на требуемой частоте пересечения, чтобы определить значение резистора RF3.
Чтобы аналитически определить значение RF3, нужно построить графики функции передачи с разомкнутой петлёй (амплитудная и фазовая характеристики) произведения каскада мощности P(s) (произведение уравнений 10 и 14) и контроллера G_CONTROLLER(s) (произведение уравнений 22 и 23). Предположим, что RF3 = 1 при расчёте усиления контроллера Kс. Тогда:

По амплитудной характеристике определите, насколько нужно уменьшить усиление на частоте пересечения. Это уменьшение усиления (без изменения фазы) должно обеспечиваться резистором RF3.
Если "X" — избыточное усиление на требуемой частоте пересечения, измеренное в дБ, то:
PI Expert автоматически строит функции передачи и определяет значение RF3, используя этот подход.
Таблица 1 ниже предлагает начальные значения для этого резистора (RF3), основанные на экспериментальных данных из разработок сетевых обратноходовых преобразователей.
Однако стоит отметить, что поскольку значение RF3 зависит от демпфирования, выходного напряжения и базового усиления по петле, эти значения не будут оптимальными для всех схем. Это всего лишь стартовые значения, которые хорошо показали себя во многих разработках.
Эти значения, как правило, увеличивают усиление системы. Поэтому, если после использования этих значений отклик на переходный процесс окажется плохим или неудовлетворительным, хорошей отправной точкой для точной настройки цепи обратной связи может быть постепенное увеличение значения RF3 с повторным тестированием переходных процессов при нагрузке.
Также в таблице приведено максимальное значение резистора (используемого с оптопарой с коэффициентом передачи тока CTR = 100), при котором гарантируется стабилизация выходного напряжения. Выбранное значение RF3 не должно превышать значения в этом столбце. Более высокие значения могут ограничить ток светодиода оптопары и привести к потере стабилизации.

Если используется оптопара с более высоким CTR, начальные значения следует соответственно увеличить.
Например, если в источнике питания на 12 В используется оптопара с CTR 400%, начальное значение и максимальное значение резистора RF3 следует увеличить в 4 раза.
Шаг 10 (если необходимо) – Выбор цепи фазового усиления (RF4 и CF2)
Резистор RF4 и конденсатор CF2 являются дополнительными компонентами и могут не требоваться во многих схемах. Если после шага 9 запас по фазе оказывается недостаточным, или если в источнике питания более трёх выходов, может понадобиться включение цепи фазового усиления, образованной RF4 и CF2. RF4 и CF2 можно рассчитать с использованием уравнений (6) и (7).

Мульти-режимное управление в TOPSwitch
Новые поколения микросхем TOPSwitch имеют четыре различных режима работы.
Конструкция микросхемы обеспечивает плавный переход между каждым из этих режимов.
С точки зрения петли регулирования, тестирование следует проводить в худших условиях — при полной нагрузке.
Во время тестирования переходных процессов или при наблюдении работы источника питания во временной области, если вы видите, что частота работы в режиме многократной модуляции (MCM) опускается ниже 25 кГц — это признак того, что петля может быть неустойчивой или условно устойчивой.
Пример на практике
Давайте применим эту процедуру для проектирования контроллера для схемы с выходным напряжением 12 В и мощностью 30 Вт.
Основные электрические параметры, необходимые для этой схемы, сведены в Таблицу 2.

Коэффициент добротности (Q) — это без потерь введённый коэффициент затухания, добавляемый в передаточную функцию топологии flyback, которая по своей природе обладает высоким затуханием (низким ξ).
Значение коэффициента Q устанавливается равным 0.15, что является хорошей отправной точкой для изолированных flyback-дизайнов на базе TOPSwitch.
Шаг 1 – Установка параметров производительности петли
Расчёт ожидаемого положения правостороннего нуля (RHP Zero)
С помощью уравнения 4 рассчитайте положение правостороннего нуля (RHP Zero) при нижнем уровне входного напряжения (low-line). Имеем:

Ноль RHP возникает на частоте 23 кГц, поэтому частота перехода (crossover frequency) должна быть значительно ниже 23 кГц. Рекомендуется, чтобы максимальная частота перехода была менее 1/5 частоты правостороннего нуля (RHP zero) — то есть ниже 23/5=4.6 кГц в этом примере.
Выбор разумной частоты перехода ƒCROSSOVER
Частота перехода должна быть ниже 1/10 частоты переключения и ниже 1/5 частоты правостороннего нуля (RHP zero).
В этом проекте мы придерживаемся рекомендуемой целевой частоты перехода 1 кГц. Это связано с тем, что это устройство рассчитано на универсальный вход, и при высоком входном напряжении коэффициент усиления силовой части выше, что приводит к повышенной частоте перехода.
Выбор желаемого фазового запаса (Open-Loop Phase Margin)
Больший фазовый запас обеспечивает меньшие перерегулирования при скачках нагрузки. Разумный фазовый запас — от 45° до 75°. В этом проекте выбирается 45° как целевой фазовый запас.
Шаг 2 — Выбор выходного фильтрующего конденсатора Cout
Конденсатор фильтра должен выбираться так, чтобы его номинальный допустимый ток пульсаций превышал рассчитанный ток пульсаций на нём.
Конденсаторы с более высоким номиналом по напряжению обычно имеют большую допустимую амплитуду тока пульсаций. Конденсаторы с более высоким номинальным напряжением имеют более низкое значение ёмкости при той же допустимой величине пульсационного тока, чем конденсаторы с меньшим номинальным напряжением.
Для этого может потребоваться использование конденсатора меньшей ёмкости, но с более высоким номинальным напряжением, чтобы обеспечить допустимый пульсационный ток.
Шаг 3 – Выбор RF5 и CF3
Используя рекомендации, изложенные в уравнении 1, можно выбрать RF5 и CF3 следующим образом:
CF3 = 47uF
RF5=6.8R
Шаг 4 – Выбор оптопары
Выберите оптопару с номинальным коэффициентом передачи тока (CTR) 100. Примеры таких оптопар: PC817A или LTV817A.
Оптопары с более высоким CTR обеспечивают снижение потребления при холостом ходе (благодаря меньшему току в установившемся режиме). Примеры таких оптопар: PC817D или LTV817D.
Шаг 5 – Выбор усилителя ошибки и опорного источника
Выберите TL431 с опорным напряжением 2.5V для этой схемы.
Для более низкого выходного напряжения можно использовать источник опорного напряжения 1.25V
Шаг 6 – Выбор RF1
Поскольку RF1 не влияет на усиление и фазу в уравнениях, его можно установить равным 10k
Шаг 7 – Выбор RF2
Из уравнения 2 имеем:

Шаг 8 – Выбор компенсирующего конденсатора CF1
Компенсирующий конденсатор CF1 задаёт полюс очень близко к 0 Гц, а также определяет частоту нуля. Выберите такой конденсатор, чтобы частота нуля составляла около 100 Гц. Используя уравнение 23, получаем:
Если рассчитанное значение не соответствует стандартному значению ёмкости, выберите ближайшее большее стандартное значение.
Выберите 47 нФ.
Шаг 9 – Выбор RF3
Установите RF3 = 1R и постройте объединённую передаточную функцию из уравнений 10, 11, 15 и 25. Это и будет результирующая амплитудная характеристика блока питания (см. Рисунок 6).
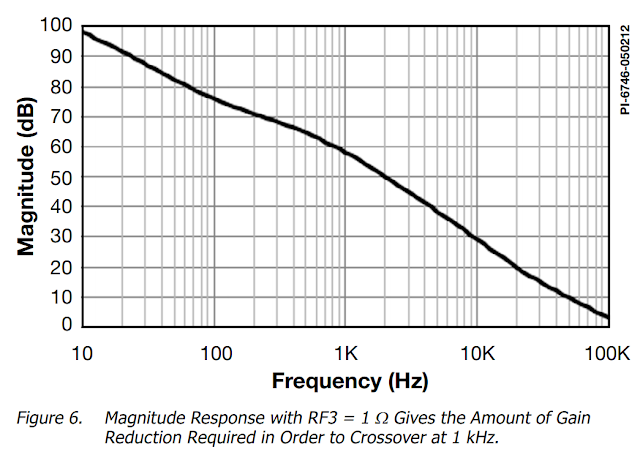
Из рисунка 6 видно, что существует избыточное усиление примерно 60 дБ на требуемой частоте перекрестного перехода 1 кГц, которое нужно уменьшить, увеличив значение RF3. Таким образом, используя уравнение (5), получаем:

Выберите следующий меньший стандартный номинал резистора (1 кОм). Альтернативно, начальное значение можно было бы выбрать из таблицы 1.

Построить реальный график усиления и фазы и проверить, какие значения компонентов нужно отрегулировать.
Построить реальный график усиления и фазы источника питания (см. раздел «Техника измерения усиления и фазы с использованием тока инжекции») с вычисленными значениями (Рисунок 7). Как показано на Рисунке 7, реальная частота перекрестного перехода немного отличается от предсказанной. Реальная частота перекрестного перехода составляет около 1,5 кГц, а фаза составляет около 60° (что является хорошим результатом). При точной настройке этого проекта разработчик может захотеть увеличить значение RF3, чтобы приблизить частоту перекрестного перехода к 1 кГц (цель). Расчеты основываются на предположениях о паразитах в проекте, поэтому эти различия не должны удивлять. Функция передачи, реализованная с компонентами, вычисленными выше, показана на рисунках 21 и 22. Она имеет 2 полюса и 1 ноль, активно участвующие в компенсации петли, и обычно называется «схемой контроллера типа 2» или просто «схемой типа 2». Более подробную информацию о контроллерах типа 2 можно найти в Приложении B.
Другим направлением для экспериментов является увеличение емкости компенсационного конденсатора CF1. Это поможет выровнять отклик в нижней частотной области, обеспечив больше усиления на частоте 120 Гц, и может помочь уменьшить компонент пульсаций линии в выходном напряжении.
Кроме того, разработчик может экспериментировать с проектом управляющей петли, попробовав фазовую цепь усиления (см. Приложение B). Эта схема должна быть использована, если из схемы типа 2 недостаточно фазы. Для этого примера эта модификация схемы (введение фазового усилителя) не требуется, но она показана для иллюстрации.
Для этого проекта, используя уравнения (6) и (7), получаем:
RF4 = 110 Ом
CF2 = 1 мкФ


Используя указанные выше значения, на Рисунке 8 показан реальный график фазы с фазовой цепью усиления. Функция передачи показана на Рисунке 25. Рисунок 8 показывает, что фазовая цепь усиления добавляет дополнительные 15° к фазовому запасу. Частота перекрестного перехода увеличилась до 4,2 кГц, и это следует скорректировать, отрегулировав (увеличив) значение RF3, чтобы частота перекрестного перехода была ближе к 1-2 кГц. Итоговая схема с фазовой цепью усиления имеет 3 полюса и 2 нуля, участвующих в компенсации, и обычно называется «схемой контроллера типа 3» или просто «схемой типа 3».
Метод измерения усиления и фазы с использованием токовой инъекции
Один из важнейших этапов при измерении параметров петли — это определение точки разрыва петли и ввода возмущающего сигнала.
Если обратиться к рисунку 9, в схеме управления с обратной связью по вторичной стороне с использованием TL431 (или любого операционного усилителя) существуют два отдельных пути. Разрыв петли в одном из этих мест даст некорректные результаты, так как один путь (Путь 1) доминирует на высоких частотах, а другой (Путь 2) — на низких.
Однако если разорвать петлю между оптопарой и управляющим выводом, то в этой точке будет содержаться объединённый сигнал от обоих путей (Путь 1 и Путь 2 с рисунка 9). При этом возникает проблема: входное сопротивление ZIN (со стороны TOPSwitch) гораздо меньше выходного сопротивления ZOUT (со стороны эмиттера оптопары).
Эту проблему можно обойти, вводя токовый сигнал в точку инъекции, а не напряжение. Принцип измерения по Bode остаётся тем же, но теперь сравниваются амплитуда и фаза двух токов.
Рисунок 10 показывает, как организовать измерение усиления и фазы в разомкнутой петле методом токовой инъекции. Обязательно убедитесь, что исследуемый источник питания изолирован от сети (AC-входа), чтобы избежать поражения током.
Согласно рисунку 10, опорный сигнал — это ошибка, поступающая на вход петли, а тестовый сигнал — отклик системы, поэтому усиление рассчитывается как CH2/CH1.
Обычно возмущающий сигнал должен быть больше на низких частотах (из-за высокого усиления петли и низкого уровня опорного сигнала) и меньше на высоких, чтобы избежать искажений малых сигналов. Следите за пульсацией переменного тока на выходе — она должна быть как можно ближе к синусоиде. Попробуйте разные уровни сигнала и выберите разумный диапазон амплитуд, который даёт стабильный результат при выбранных частотах. Также на низких частотах (ниже 200 Гц) требуется более длительное интегрирование и большее число выборок для стабильности результатов.
Усиление выше 50 дБ сложно измерить с надёжностью из-за низкого отношения сигнал/шум. Поскольку петля разрывается на первичной стороне, убедитесь, что анализатор изолирован от сетевого входа, чтобы избежать наводок и серьёзных ошибок в измерении.

Тестирование на переходную нагрузку
Даже если у вас есть сетевой или частотный анализатор, тестирование на переходную нагрузку всегда должно проводиться как способ проверки абсолютной устойчивости источника питания. Измерения коэффициента усиления по петле дают представление об относительной устойчивости, но именно тест на переходную нагрузку показывает поведение при реальных нелинейных условиях. Он подвергает источник питания сильным изменениям сигнала и выявляет возможные эффекты насыщения усилителя ошибки. Это очень удобный и эффективный способ проверки устойчивости источника питания. Кроме того, это недорогой метод, не требующий сложного оборудования. Хотя он и не даёт точных данных о фазовом и запасе по усилению, он предоставляет важную информацию о том, стабилен ли источник питания или нет.
Ниже приведена серия осциллограмм с переходной нагрузкой. Мы также проанализируем каждый график, чтобы понять, какую информацию он даёт.
Сначала рассмотрим пример схемы, представленной на рисунке 1, и намеренно внесём в неё изменения, чтобы вызвать неустойчивость и посмотреть, как она проявляется на графике переходной нагрузки. Для начала увеличим усиление до уровня, вызывающего неустойчивость. Заменим резистор RF3 (R6 на рисунке 1) с 1 кОм на 50 Ом. Неустойчивость источника питания очевидна — она сопровождается слышимым шумом. На рисунке 11 показан график переходной нагрузки для этой схемы.
Можно заметить колебательный характер сигнала, когда источник питания нагружается до 2,1 А и работает в режиме непрерывной проводимости (CCM). Частота колебаний около 10 кГц. Кроме того, когда нагрузка уменьшается до 1 А и источник переходит в режим прерывистой проводимости (DCM), усиление резко падает, что стабилизирует источник питания. Это видно по отсутствию колебаний на нижнем уровне ступеньки нагрузки.
Теперь давайте увеличим резистор RF3 до 200 Ом. Это уменьшает усиление, что должно стабилизировать систему и обеспечить некоторый фазовый запас. Соответствующий отклик показан на Рисунке 11.
На Рисунке 12 видно, что система теперь едва стабильна, но фазовый запас всё ещё очень мал — об этом говорят затухающие колебания, которые возникают перед установлением в устойчивое состояние при токе нагрузки 2.1 А.
Теперь вернём резистор RF3 к исходному значению 1 кОм. Посмотрим, как повлияет уменьшение ёмкости CF1 (конденсатор C12 на Рисунке 1) в цепи компенсации.
Согласно передаточной функции контроллера (см. Приложение B), при уменьшении CF1 частота компенсационного нуля смещается выше.
Это приводит к уменьшению фазового подъёма, а значит и к снижению фазового запаса.
Используем ёмкость 2.2 нФ вместо исходных 0.1 мкФ. Рисунок 13 показывает график переходного процесса при скачке нагрузки.
На графике показан скачок нагрузки от 1.25 А до 2.5 А (с 50% до 100%).
Важно отметить, что при 1.25 А источник работает в DCM, а при 2.5 А — в CCM.
Сначала рассмотрим переходный отклик при 2.5 А.
Уменьшение компенсационного конденсатора снизило фазовый запас — это видно по затухающим колебаниям.
Очевидно, в режиме CCM такая компенсация неприемлема с точки зрения фазового запаса.
Однако в режиме DCM наблюдается ещё более интересное явление:
при снижении тока до 1.5 А источник входит в DCM, нарушает условную устойчивость и начинает колебаться.
Теперь давайте медленно увеличим значение компенсационного конденсатора от 2.2 нФ до исходных 0.1 мкФ, при которых мы знаем, что источник стабилен.
Рисунок 14 показывает переходную характеристику при значении 0.01 мкФ.
Здесь видно, что проблема фазового запаса уменьшилась, но в режиме DCM он всё ещё очень низкий — колебания стали затухающими, но выраженными.

Рисунок 15 показывает эффект от применения 22 нФ — фазовый запас улучшается, что видно по уменьшению амплитуды колебаний.
Увеличение конденсатора до 100 нФ полностью решает проблему (Рисунок 16) —
источник питания стабилен как в CCM, так и в DCM при этом значении сетевого напряжения.
Те же тесты нужно провести при пониженном и повышенном сетевом напряжении, чтобы убедиться, что источник питания стабилен на всём диапазоне рабочих условий.
Комментариев нет:
Отправить комментарий